
 不详
不详
7.5.1 操作效率概述
操作效率是指单位时间内员工有效工作效率,也叫“能率”,是代表在既定的管理条件下生产线员工的实际工作能力的指标。其中,影响生产线操作效率主要因素是员工的士气及操作损失,与其他的管理损失没有关系,所以很多情况下我们可以用此指标衡量现场班组长的管理能力。

7.5.2 动作经济原则
通过对人体动作能力的研究,创立的一系列能最有效地发挥人的能力的动作原则,由于它能使工作者的疲劳最少、动作迅速而容易、增加有效的工作量,因而被称为经济原则。
(1)原则一:减少动作数量
取消不必要的动作。
减少眼睛的动作。
组合两个以上动作。
工具材料放在操作者前面的固定位置处。
把工具、物料放置成便于作业的状态。
按作业顺序放置工具、物料。
利用便于抓取工具、物料的物料箱。
把两个及以上的工具合并成一个。
利用快动夹紧机构。
用一个动作操作机器。
改善前 | 改善后 |
|
|
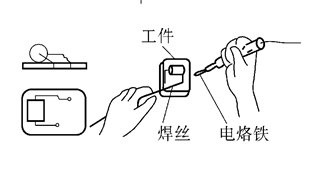
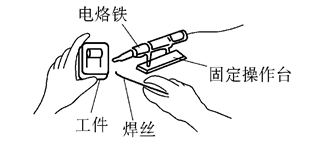
图7-13 取消不必要的动作
改善前 | 改善后 |
|
|
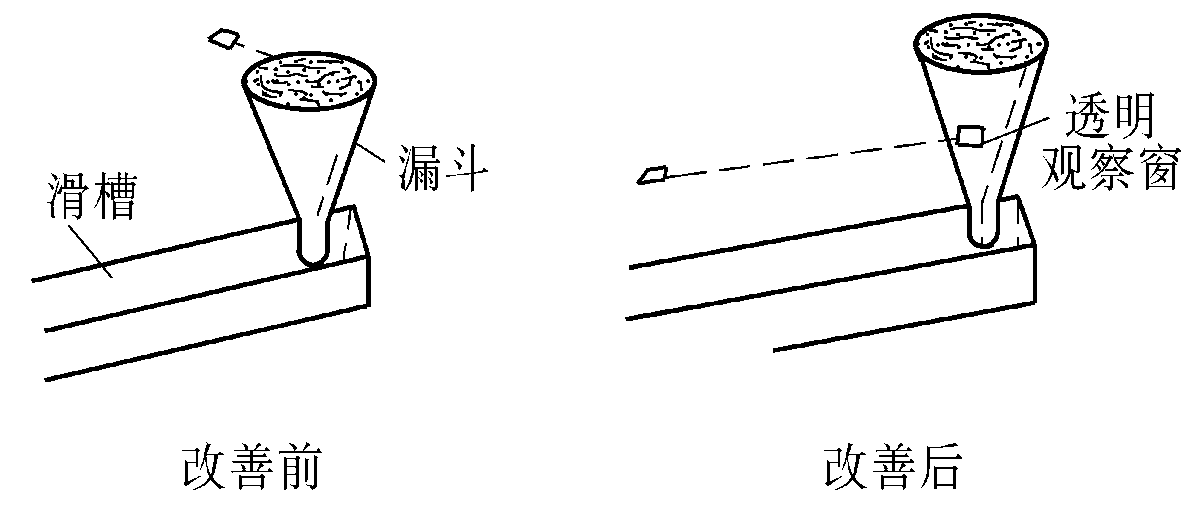
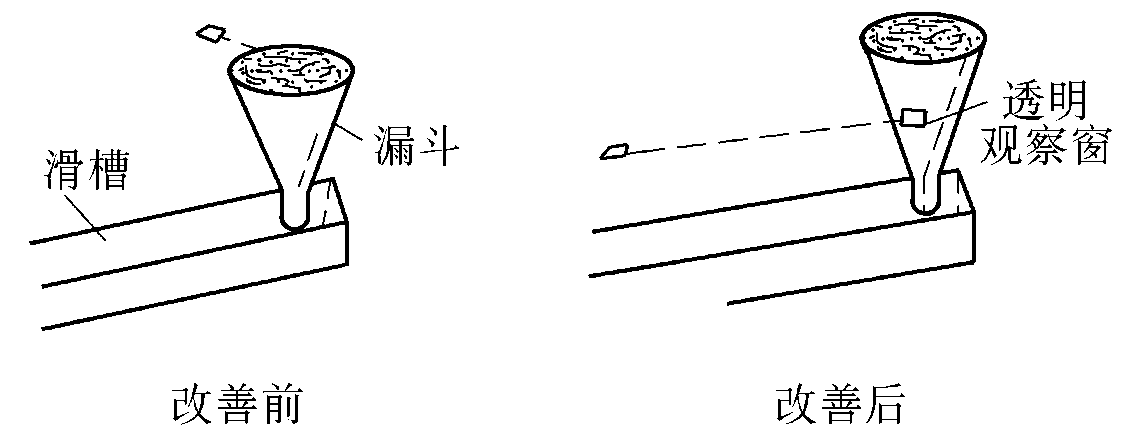
图7-14 减少眼睛的动作
改善前 | 改善后 |
|
|
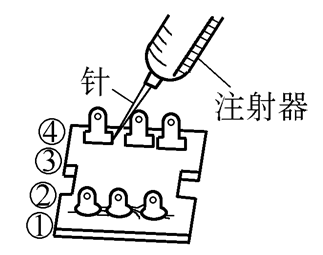
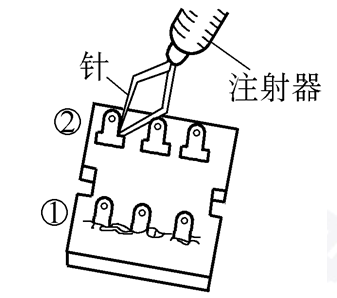
图7-15 组合两个以上的动作
形迹定位 | 固定物料箱 |
|
|
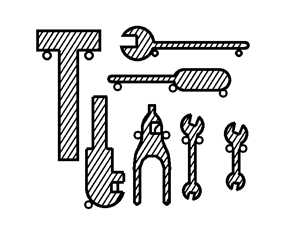
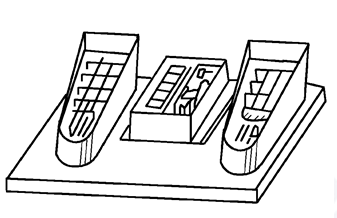
图7-16 工具材料放在操作者前面的固定位置处
改善前 | 改善后 |
|
|
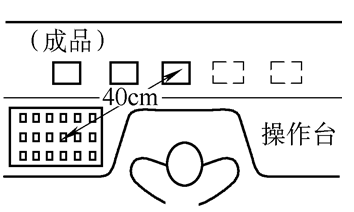
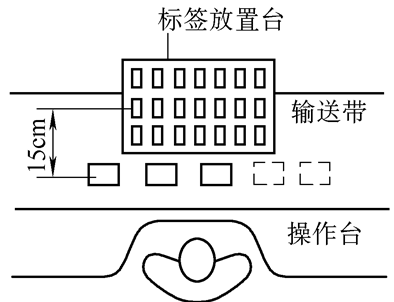
图7-17 把工具、物料放置成便于作业的状态
改善前 | 改善后 |
|
|
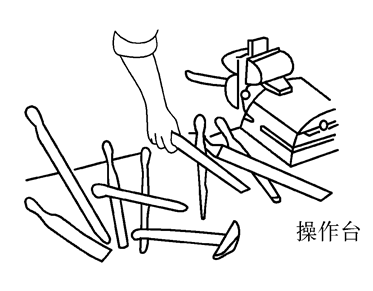
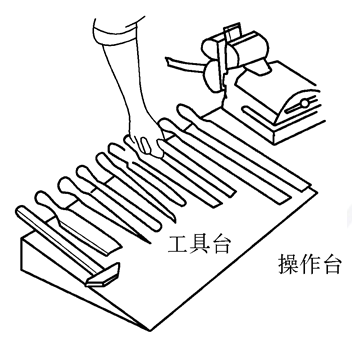
图7-18 按作业顺序放置工具物料
改善前 | 改善后 |
|
|
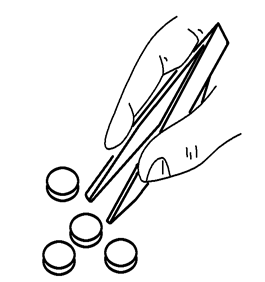
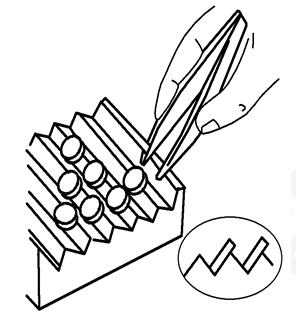
图7-19 利用便于抓取工具、物料的物料箱
改善前 | 改善后 |
|
|
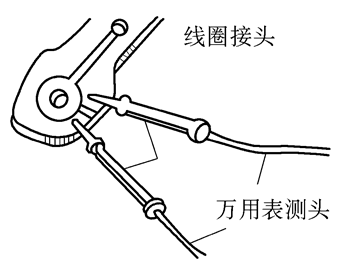
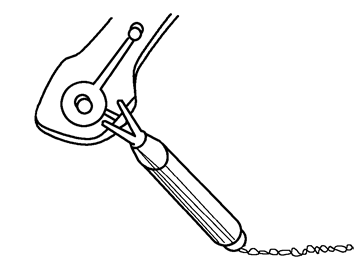
图7-20 把两个及以上的工具合并成一个:合并万用表的测头
改善前 | 改善后 |
|
|
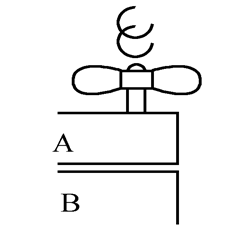
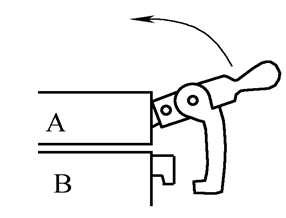
图7-21利用快动夹紧机构
改善前 | 改善后 |
|
|
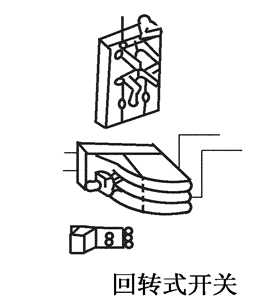
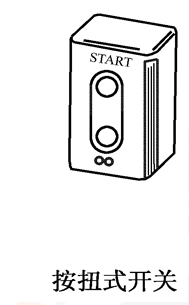
图7-22 用一个动作操作机器:回转式开关改为按钮式开关
(2)原则二:双手同时作业
双手同时开始,同时完成动作。
双手对称、反向同时动作。
按双手能同时动作布置作业现场。
采用固定工具固定需要长时间拿住的目的物。
采用能用足进行作业的工具完成简单的或需要力量的作业。
设计能双手同时操作的夹具。
改善前 | 改善后 |
|
|
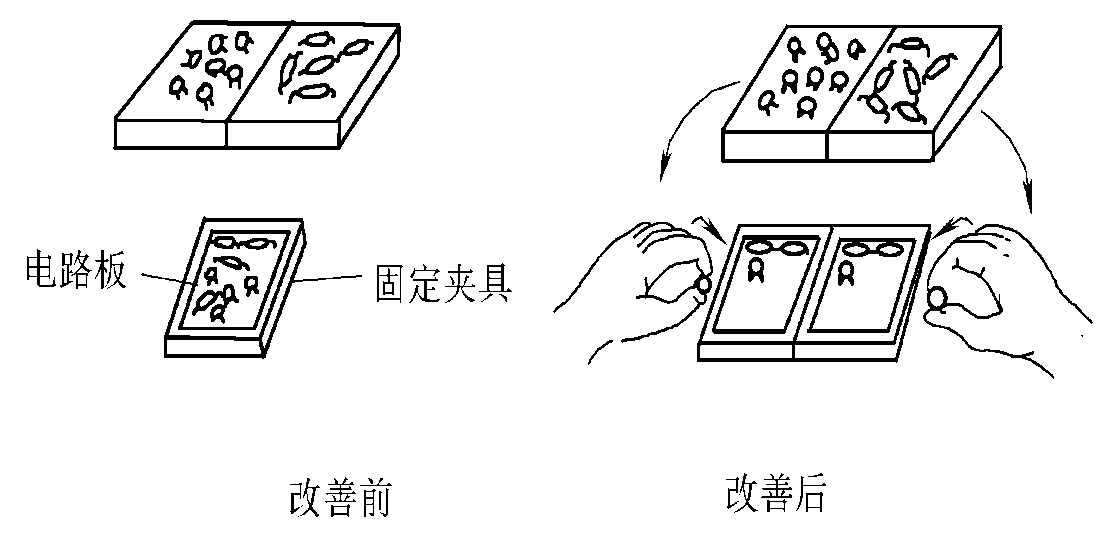
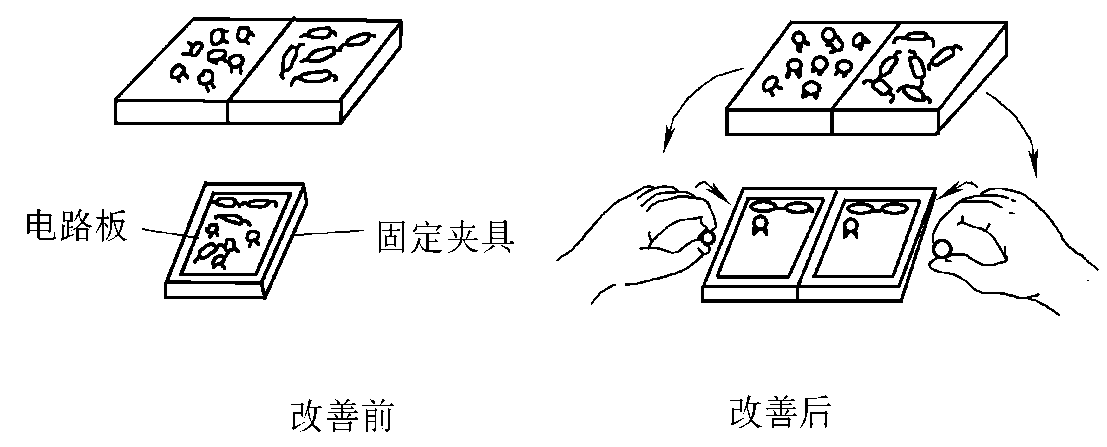
图7-23 用一个动作操作机器:回转式开关改为按钮式开关
改善前 | 改善后 |
|
|
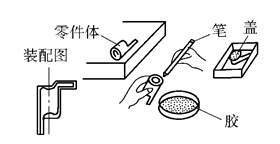
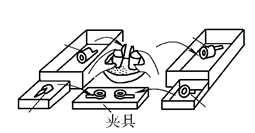
图7-24 双手对称、反向同时动作
改善前 | 改善后 |
|
|


图7-25 按双手能同时动作布置作业现场1
改善前 | 改善后 |
|
|
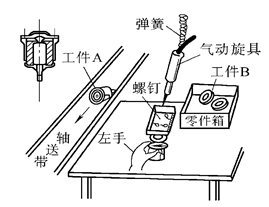
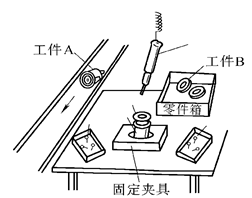
图7-26 按双手能同时动作布置作业现场2
用足操作的钻床 | 用足操作的锡钎焊机 |
|
|
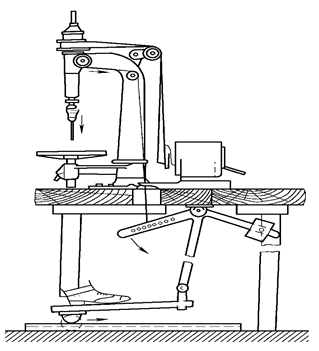
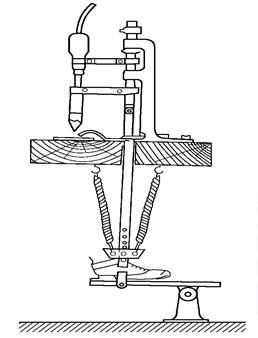
图7-27 采用能用足进行作业的工具完成简单的或需要力量的作业1
改善前 | 改善后 |
|
|
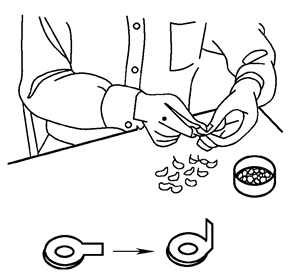
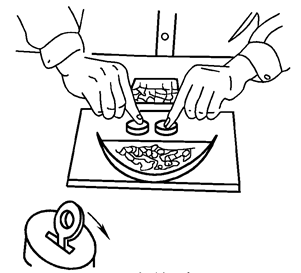
图7-28 采用能用足进行作业的工具完成简单的或需要力量的作业2
(3)原则三:缩短动作距离
便于用最适当的人体部位动作。
用最短的距离进行动作。
在不妨碍作业的前提下尽量使作业区域狭窄。
利用重力和机械动力送进、取出物料。
用人体最适当的部位操作机器。
便于用最适当的人体部位动作 |
|
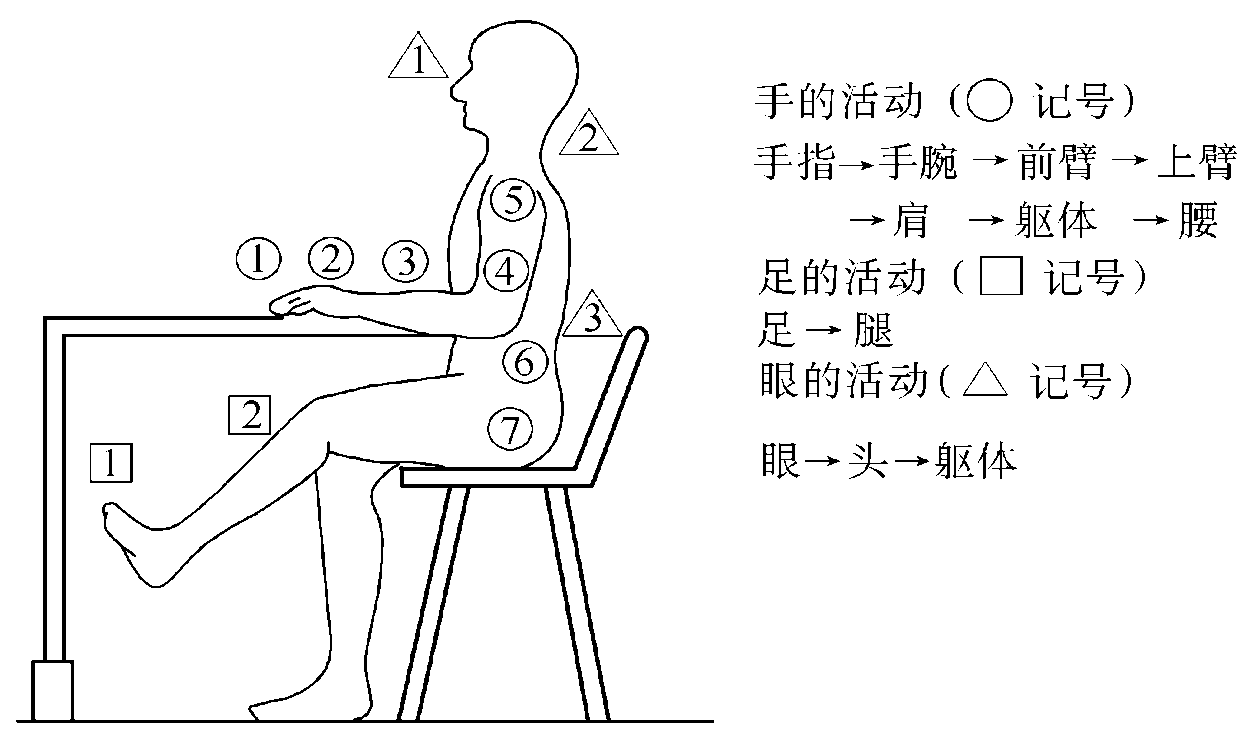
图7-29 便于用最适当的人体部位动作
改善前 | 改善后 |
|
|
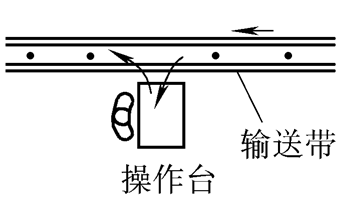
图7-30 用最短的距离进行动作
改善前 | 改善后 |
|
|
图7-31 在不妨碍作业的前提下尽量使作业区域狭窄
改善前 | 改善后 |
|
|
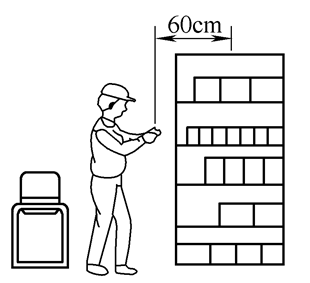
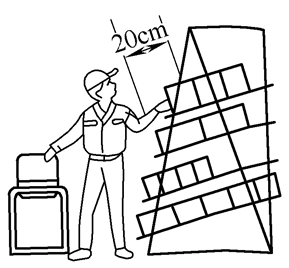
图7-32 利用重力和机械动力送进、取出物料
改善前 | 改善后 |
|
|
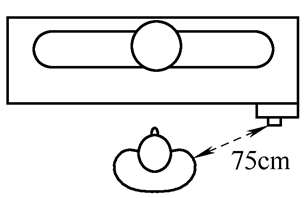
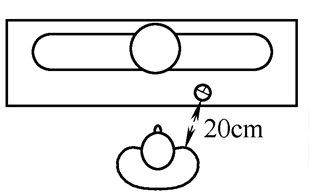
图7-33 用人体最适当的部位操作机器
(4)原则四:轻松作业
使动作不受限制轻松进行。
利用重力及惯性力和反冲力动作。
连续圆滑地改变运动方向。
最适当的作业位置高度。
利用夹具和导轨规定运动路径。
把操作受柄做成便于抓握的形状。
把夹具的对准位置设计成可观察型。
使操作方向与机器的移动方向一致。
使工具轻巧。
改善前 | 改善后 |
|
|
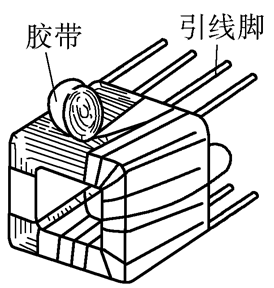
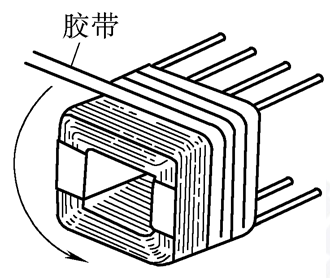
图7-34 使动作不受限制轻松进行
改善前 | 改善后 |
|
|
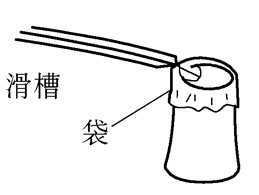

图7-35 利用重力及惯性力和反冲力动作
改善前 | 改善后 |
|
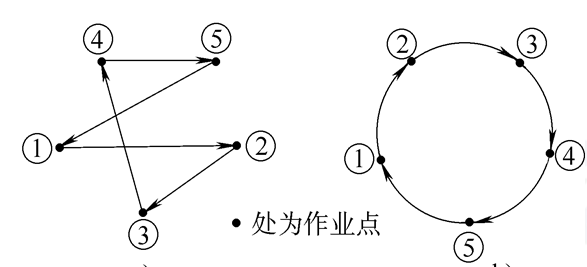
图7-36 连续圆滑地改变运动方向
改善前 | 改善后 |
|
|
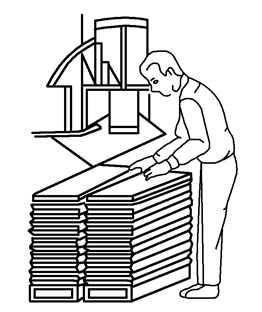
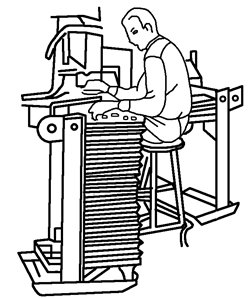
图7-37 最适当的作业位置高度
改善前 | 改善后 |
|
|
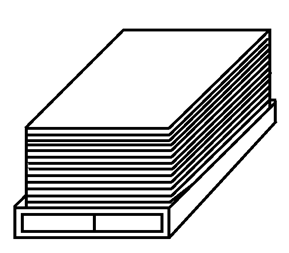
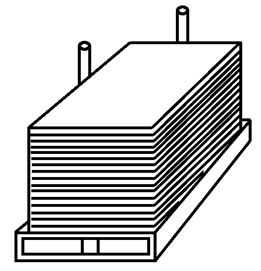
图7-38 利用夹具和导轨规定运动路径
改善前 | 改善后 |
|
|
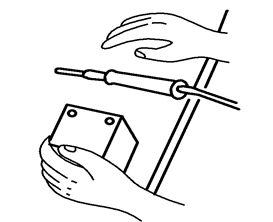
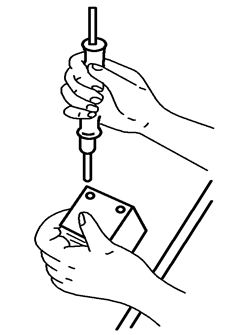
图7-39 使工具轻巧
表7-26 动作经济原则
基本原则 | 动作方法 | 作业场所布置 | 工夹具与设备 |
减少动作数量 | 1.消除不必要动作 | 1.将材料或工装夹具放在操作人员前方的一定位置 | 1.利用易取材料或元件的容器或器具 |
双手同时动作 | 1.双手同时开始动作并同时结束 | 调整布局使双手能同时动作 | 1.对需长时间持有的物品使用支撑架 |
缩短动作距离 | 1.以最适宜的身体部位进行动作 | 以操作不受妨碍为前提缩小操作空间 | 1.利用重力或机械力取料送料 |
轻松动作 | 1.努力使动作不受限制 | 使操作高度为最合适的高度 | 1.为限制一定的运动路线而使夹具或导向 |

